BAROPODOMETRIE



La baropodométrie, est l'étude des pressions plantaires en statique et en dynamique. Elle est un complément de l’examen clinique et permet de mesurer en fonction du temps, les pressions et les surfaces de contact qui s’appliquent sous le pied et d’en déduire les forces qui s’appliquent sur ces surfaces.
Ce type d’investigation a attiré l’attention des chercheurs dans l’application biomédicale. Le dispositif peut être sous forme de plateforme, de tapis de marche, de capteurs libres (capteur unique), ou de semelles embarquées (tableau 1). Ces dernières, utilisées en recherche et en clinique, permettent d’obtenir des mesures plus proches de la situation écologique du patient, c’est-à-dire sur des terrains plus ou moins accidentés avec le pied chaussé, contrairement aux autres formats. Les données peuvent être collectées sans le problème de « Targeting » (= ciblage). Le ciblage est un problème qui se produit lorsque le patient modifie son mode de marche afin qu'ils puissent entrer en contact avec la plateforme.
En déclenchant des capteurs de force sous l'effet de l'appui du pied, on obtient une cartographie instantanée. Le capteur va convertir la pression en tension électrique. Le signal produit par leur excitation est recueilli et traité, puis reproduit sous forme d'image où chaque valeur de pression est convertie en couleur. L'analyse baropodométrique permet d'objectiver les paramètres biomécaniques du pied et est un outil dans le diagnostic de certains troubles de l’appui plantaire et de paramètres spatio-temporels. Cet outil peut être utile dans le domaine du sport, dans la prise en charge des patients neuropathes, dans la routine clinique podologique, etc.
C’est un très bon outil d’aide au diagnostic qui fournit des données quantifiables qui seraient des arguments complémentaires pour le choix des indications thérapeutiques (appareillages, chirurgie,…) et une meilleure évaluation des effets de ces thérapeutiques sur la stato-dynamique du sujet.
Les principales informations qui ressortent sont la répartition des pressions, leur quantification et la trajectoire du centre de pressions. C'est un outil qui permet de quantifier l'évolution de la pathologie du patient, faire un suivi chiffré, et stocker aussi bien le fichier patient que les cartographies de pression.
Il y a la possibilité de réaliser une analyse statique et dynamique :
L’analyse statique permet d’obtenir des informations sur la posture en charge, ainsi on s’intéressera au déplacement du centre de pression, ce qui donnera des informations sur la stabilité du patient.
L’analyse dynamique donne des informations sur la quantification des appuis, la répartition des pressions et sur la cinématique du sujet. La trajectoire du centre de pression informera du déroulé du pas. Ainsi plusieurs changements de direction à un moment du pas nous informera d’un trouble à cet instant.
1. Les capteurs de pression
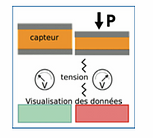
Un capteur est un élément de mesure qui transforme une grandeur physique à mesurer (= mesurande), (figures 1 et 2) qui dans notre cas sera la force, en une grandeur normée électrique (= réponse). Plus précisément, il convertit une variation de force en tension électrique. Le capteur produit ainsi un signal électrique proportionnel à la force appliquée. Ce signal analogique de sorti du capteur sera directement exploitable. Ce signal doit toutefois être converti en un signal numérique si on désire utiliser un affichage numérique. La conversion se fait par l’intermédiaire d’un circuit convertisseur analogique/numérique (6).
Figure 1 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Figure 2 : Revue du podologue n° 63 • mai-juin 201
La tension change en raison de la pression appliquée. Le capteur donne une force qui sera appliquée sur une surface ; et il en résultera une pression. Le vecteur force est positionné au centre de masse, c’est une action mécanique capable d'imposer une accélération.
P = pression en Newton/cm2
F = force
S = surface d’un capteur
P=F/S
Idéalement, il faudrait que la réponse de l’élément de mesure ne dépende que du mesurande. Malheureusement, en pratique, les grandeurs d’influence viennent perturber le fonctionnement du capteur et entrainent souvent des erreurs de mesure. Les principales grandeurs d’influence sont : la température, les vibrations, les chocs, le temps (vieillissement), l’humidité, la position et la fixation d’un capteur, les effets d’une immersion, la corrosion, les rayonnements nucléaires, la gravité, etc... Il faut faire en sorte de réduire le plus possible les effets des grandeurs d’influence sur la mesure en stabilisant et/ou en compensant ces grandeurs ou leurs effets.
1.1. LES CARACTERISTIQUES D’UN CAPTEUR DE PRESSION
Fréquence d’acquisition :
C’est le nombre d’images par seconde, c’est à dire le nombre de points que le système d’acquisition recueille sur le signal analogique donné par le capteur pour en permettre la transcription numérique.
Une fréquence élevée permet d’avoir plus de finesse dans l’analyse temporelle des données. Une fréquence d’acquisition d’au moins 100 Hz est nécessaire lors d’une course, tandis qu’une fréquence de 50 Hz suffit pour une marche normale. Les pressions doivent être échantillonnées à 40 Hz (voire 5 Hz) pour étudier les métriques de posturologie, ce qui peut aussi être calculé a posteriori à partir de données échantillonnées avec une plus haute fréquence. Plus la fréquence et la définition sont élevées, plus la taille des fichiers est importante.
Il y a une bande passante qui limite la fréquence d’acquisition à une certaine vitesse pour la connexion Bluetooth : il y aura une vitesse maximum d’envoi. La bande passante va limiter la fréquence d acquisition. La limite en Bluetooth est 100 Hz. En USB il y a une vitesse maximum d envoi qui est plus rapide qu’en Bluetooth.
Etendue de mesure :
Valeurs extrêmes du mesurande pouvant être mesurée par le capteur (portée minimale et maximale) (figure 3).
Figure 3 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Résolution de mesure de pression :
Plus petite variation de grandeur mesurable par le capteur. C’est à dire à quel point le dispositif peut différencier deux pressions différentes.
Résolution spatiale :
Correspond au nombre de capteurs et à la densité. Les capteurs sont répartis de manière matricielle avec une densité de 1 à 4 capteurs / cm2 dans les systèmes actuels.
Sensibilité :
pour un capteur, c’est la variation du signal de sortie par rapport à la variation du signal d'entrée.
Précision :
Aptitude du capteur à donner une mesure proche de la valeur vraie : La précision est un des paramètres les plus importants d’un système de mesure. Elle permet d’évaluer la qualité de mesure en donnant l’idée de l’ampleur de l’erreur affectant la mesure. La précision fait appel à la notion de fidélité et de justesse, puisqu’un capteur précis est juste et fidèle.
Rapidité :
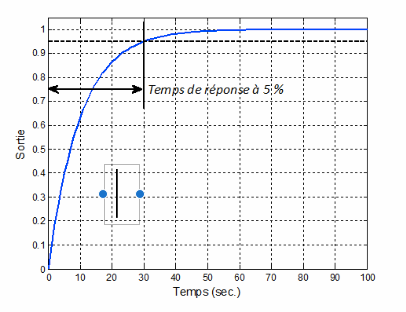
C’est le temps de réaction du capteur. La rapidité est liée à la bande passante et indique l’aptitude d’un capteur à suivre dans le temps les variations de la grandeur physique à mesurer. En effet, il faut toujours un certain temps pour qu’un changement du signal à l’entrée soit perçu à la sortie (figure 4).
Figure 4 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Linéarité :
représente l'écart de sensibilité sur l’étendue de mesure. La linéarité est une caractéristique qui définit la constance de la sensibilité sur toute la plage de mesure.
Hystérésis :
L’hystérésis peut être de nature mécanique ou électrique. En mécanique, l’hystérésis est associée aux phénomènes de frottement sec et de jeu dans un mécanisme. En électrique, l’hystérésis est associée à des phénomènes de polarisation magnétique ou électrique.
1.2. LES DIFFERENTS TYPE DE CAPTEURS DE PRESSION
La technologie change mais le principe est le même. Il existe 4 types principaux de capteurs de pression: résistifs, capacitifs, piézoélectriques et jauges de contraintes. Ils sont basés sur des principes physiques différents, ce qui leur confère des propriétés distinctes.
Les semelles de baropodométrie embarqués et les plateformes baropodométriques mesurent la force verticale (composante verticale du VFR) sur chacun des capteurs et rapporté à la surface d’un capteur on obtient une pression. Le vecteur force est positionné au centre de masse, c’est une action mécanique capable d'imposer une accélération. Ces capteurs ne codent que pour la dynamique verticale de la force d’application qui leur est opposée. Leur surface est variable. Ils permettent de mesurer la répartition des appuis sous le pied et, pour un capteur donné, l’évolution de la pression en fonction du cycle de marche. En baropodométrie aura des capteurs de type: résistifs, capacitifs ou piézoélectriques.
Capteurs résistifs (capteur passif)
Figure 5 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Ce type de capteur utilise la notion de variation d’impédance résistive (figure 5) :
On peut donc déduire une pression en mesurant la variation de la résistance. Lorsqu'une pression est appliquée le capteur mesure la résistance de la mousse conductrice entre deux électrodes. Le courant, qui traverse la résistance du capteur, augmente sous la pression. La pression crée une modification de la résistance.
Ce capteur est constitué d’un polymère bi-composant conducteur, de quelques millimètres d’épaisseurs en sandwich entre un système matriciel d’électrode. Il peut être composé d’encre conductrice. Lors de l’écrasement il y a modification du système électrique qui ne sera pas lié à l’épaisseur enregistré entre les deux composants, mais sera lié à la surface d’étalement de l’encre. L’application d’une force conduit à la diminution de l’épaisseur du capteur : c’est une modification de sa résistance. Il faut un étalonnage pour définir la variation de tension à la force appliquée.
Les avantages : Haute précision, électronique simple, peu coûteux
Les inconvénients : Est plus variable en fonction de la température. Les mesures sont peu fiable pour les hautes pressions, plus on monte en pression et moins on pourra discriminer les valeurs de pression (exemple : on dissocie bien entre 1 et 4N mais on ne voit pas de différence entre 20 et 24N) nécessité d’un support déformable et d’une température constante. Le vieillissement du capteur est relativement rapide : durée de vie de 1 an. On retrouvera une variation de mesure et reproductibilité.
Capteurs capacitifs (capteur passif)
Figure 6 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Ce type de capteur utilise la notion de variation d’impédance capacitive (figure 6). La pression crée une modification de la capacité. Ce capteur est constitué de deux plaques conductrices chargées électriquement séparées par une couche diélectrique élastique. Une fois qu'une pression est appliquée il y a raccourcissement de la distance entre les deux plaques créant un changement de tension proportionnel à la pression appliquée.
Ce capteur est conçu selon le principe du condensateur plan : 2 électrodes d’une certaine surface en regard l’une de l’autre séparée d’une distance x par un élastomère. La pression modifie la capacité entre les 2 électrodes (Il n’y a des électrodes que pour le capacitif). C’est un capteur de pression à membrane et la déformation de la membrane change la capacitance.
Les avantages : Bonne définition de la force, réponse rapide, hystérésis modéré, sensibilité faible à la température. Les capteurs capacitifs sont capables de mesurer le poids de votre patient, sans avoir à renseigner la valeur.
L’inconvénient : électronique coûteuse, les mesures sont dépendantes de l’humidité.
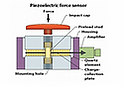
Capteurs piézoélectriques (capteur actif)
Figure 7 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Figure 8 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
Le phénomène de piézoélectricité se produit dans certains cristaux dit ”piézoélectriques”. Le cristal piézoélectrique réagit à des contraintes changeant sa polarisation. Le quartz est un de ces cristaux piézoélectriques (figures 7 et 8). Pour faire apparaitre une contrainte dans le cristal, il suffit de lui appliquer une force F.
La force crée une variation de la tension (=V), qui sera mesurée. Avec la déformation la tension mesurée sera différente. Le capteur est modifié avec la force et ça modifie la tension. Le fait d’appliquer une force crée un signal électrique. Une tension est générée due aux contraintes générées par la force F.
Ce ne sont pas des électrodes mais un matériau complet et le fait de le comprimer change le comportement.
C’est la propriété que possèdent certains corps de produire un courant sous l’action d’une force mécanique et réciproquement de se déformer lorsqu’on leur applique un champ électrique (Ex. 1 quartz de 1 cm3 soumis à 1 force de 2kN peut produire 12500 V).
Les avantages : déformabilité réduite, excellente linéarité, hystérésis faible, réponse très rapide.
Les inconvénients : absence d’adaptation à la surface de mesure, Volume, coût élevé. Ces capteurs ne peuvent pas être utilisés pour faire des mesures statiques. En dynamique, ils permettent des mesures globales uniquement, les mesures régionales sont impossibles.
ATTENTION NE PAS CONFONDRE BAROPODOMETRIE ET PLATEFORME DE FORCE :
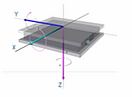
Les plateformes de force dynamométriques permettent de calculer des variables cinétiques (forces, moments, couple de puissance articulaires, déplacement du centre des pressions), c’est à dire mesurer les forces de réaction d’appui au sol décomposées dans les trois plans de l’espace : les composantes verticale, antéro-postérieur et médio-latérale (figure 9)
Les capteurs peuvent être piézoélectriques ou de type jauges de contraintes.
Figure 9 : D’après les notes de cours de GPA668 capteurs et actionneurs par Guy Gauthier professeur en GPA session automne 2012 département de génie de la production automatisée.
La cinétique correspond à l'étude des causes du mouvement et des forces qui concourent au mouvement. Elle est définie par ces grandeurs mécaniques:
-la force: le vecteur force est positionné au centre de masse, c’est une action mécanique capable d'imposer une accélération.
-le moment : le moment est l'étude du mécanisme qui permet à l'articulation de se mobiliser; une force s’applique sur un des deux segments et va pouvoir permettre une rotation autour d'un centre articulaire; c'est l'étude de ce qui permet de mobiliser une articulation. Le moment traduit l'aptitude de cette force à faire tourner un système mécanique autour de ce point, souvent appelé pivot.
Le moment interne est le moment fourni, celui qui est lié à l'activité musculaire autour de l'articulation et aux résistances capsulo-ligamentaire de l'articulation. C'est la capacité musculaire à répondre à une sollicitation externe.
Le moment externe est le moment calculé; le moment qui est lié au vecteur force de réaction au sol sous l'effet de la pesanteur: c'est la conséquence de la pesanteur.
-la puissance: La puissance est la quantité d'énergie fournie ou absorbée par unité de temps, c'est la vitesse de travail.
-le travail : est l’énergie fournie par cette force lorsque son point d'application se déplace.
Tout ceci est le principe fondamental de la mécanique. La cinétique va nous dire que pour permettre un mouvement il faut un système musculaire qui exerce au niveau de l'articulation un moment pour contrecarrer l'effet de la pesanteur sinon la pesanteur prédomine et c'est la chute.
Jauges de contraintes :
Figure 10 : Blog : le pesage et ses techniques(capteurs de pesage à jauges de contrainte)
Ces capteurs enregistrent selon les 3 axes la force d’action résultante sur la plateforme de force au cours du temps, et donne par un calcul d’intégration numérique, les vitesses et les déplacements du centre de gravité.
Elles reposent sur le principe d’un fil qu’on déforme (figure 10). Par traction ou compression, le fil devient plus ou moins long par rapport à son état de repos. Cette variation de longueur modifie la résistance électrique du fil. Cette variation de résistance est mesurée entre l’état de repos et l’état sous contrainte.
Les plateformes de force vont enregistrer les efforts qu’exerce le sujet au sol. Les forces et les moments enregistrées sont donc décomposés en trois composantes: verticale, postéro-antérieur et medio-latérale.
La composante verticale représente les efforts au niveau du sol elle va en direction du haut (figure 11). Tout d'abord en phase d'appui il y a un premier petit pic qui est la première partie du contact talonnier (amorti). En phase de mise en charge on monte à 120 % du poids du corps, on pèse donc plus lourd de 20 %. Puis en monopodal le sujet est plus léger, et on est à 80 % du poids du corps; c'est à cause de l'autre jambe qui est en phase oscillante ce qui dissipe de l'énergie et nous allège par son balancement.
Figure 11 : Caractéristique de la composante verticale durant un appui de marche et de course (Allard et Blanchi, 1996; Farley et Ferris, 1998; Novacheck, 1998)
Puis en phase pré-oscillante, qui est la phase de propulsion, le sujet remonte à 120 % du poids du corps: c'est plus une phase d'entretien ou on injecte un peu d'énergie dans le système pour garder une vitesse constante une fois que la vitesse est stabilisée. On injecte donc de l'énergie à 20 % du poids du corps pour garder une vitesse constante. Puis cette force disparaît quand le pied décolle, car il n'y a pas de force après 60 % du cycle de marche, pas de force en phase oscillante. Entre les deux pics, la composante de la force verticale chute (pied à plat au sol)
pic1 : Contact du talon au sol
pic 2: Propulsion terminale au sol
La composante antéro-postérieure qui est un effort de cisaillement, permet de freiner le pied au sol au début du pas de manière antéro- postérieurs (15 % du poids du corps) puis en fin de phase d'appui je vais pousser sur mon pied pour me propulser (17 % du poids du corps) (figure 12).
Figure 12 : Caractéristique de la composante antéro-postérieure durant un appui de marche et de course (Allard et Blanchi, 1996; Farley et Ferris, 1998)
Si la composante de la force de réaction au sol est négative : le sujet pousse vers l’arrière (action frénatrice) ; Si la composante nulle : le pied est à plat au sol ; Si la composante est positive : le sujet a une action vers l’avant (action propulsive).
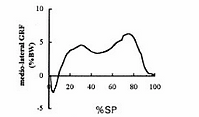
La composante médio-latérale : c'est une force de cisaillement (figure 13). L'appui commence un peu vers l’intérieur, puis se déroule vers l'extérieur du pied, puis fini à l'intérieur car la propulsion se fait physiologiquement sous la première tête métatarsienne. Ceci représente un maximum de 5 % du prix du corps. Au contact, le pied est vers l’intérieur : réaction latérale. Pied à plat au sol, stabilité nécessaire suite au transfert de poids car l’autre jambe oscille. La poussée finale provoque un nouveau transfert de poids.
Figure 13 : Caractéristique de la composante médio-latérale durant un appui de marche et de course (Allard et Blanchi, 1996)
2 L’analyse statique baropodométrique
Mesure de l’intensité et de la répartition des pressions avec une étude des modifications du centre de gravité dans le temps en charge statique immobile.
La projection du centre de masse (CDM) correspond à 1 point si le sujet est totalement immobile.
Le centre de pression demeure la donnée de référence et à la base de tout autre calcul (7).
3 L’analyse dynamique baropodométrique
C’est l’analyse de la phase d’appui uniquement. On mesure l’intensité et de la répartition des pressions, le temps d’appui et le déplacement du centre de masse qui donnera une trajectoire du déplacement dans le plan horizontal. Le centre de masse est le barycentre des pressions. Il est calculé à chaque instant de la phase d’appui. L’étude des trajectoires du centre de masse donne des informations sur le déroulé du pied en général, et permet en particulier de déterminer la pronosupination du pied (figure 14). La variabilité des trajectoires informe de la stabilité des appuis du pied.
Figure 14
La méthodologie doit être rigoureuse avec une marche aussi normale que possible:
-
au moins 2 essais préalables
-
analyse du second pas sur la plateforme (Protocole two step). Il est nécessaire de réaliser 5 mesures par pied pour mettre en avant une bonne reproductibilité.
-
Il est nécessaire de réaliser 12 mesures par pied sur baropodométrie embarquée pour mettre en avant une bonne reproductibilité, et ne pas analyser les mesures avant le 5e pas.
-
vitesse établie
-
ne conserver que les pas « normaux ».
Les courbes obtenues
Pression maximale
Force verticale, pression plantaire moyenne sous l'ensemble du pied
Aire d'appui
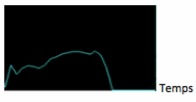
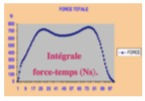
L'intégrale force / temps (newton / seconde)
Cela correspond à l'accumulation de la pression au cours du temps, c'est-à-dire à la pression intégrée sur une période (figure 15). C'est la surface inscrite sous la courbe d'évolution de la force. Ceci permet d'apprécier la quantité de charge aux différentes zones préalablement définies. Cette métrique pondère la pression appliquée par le temps et donc dépend du poids du sujet et de la durée de l'appui.
Figure 15
Le LMFI, c'est-à-dire le latéral médial force index
C'est la courbe de la force latéro-médiale au cours du temps.
LMFI = intégrale force / temps latéral ou médial
Le LMFI est un index qui permet de quantifier une pronosupination dynamique du pied pour ainsi classifier un patient. Cet index peut permettre aussi d'évaluer l'efficacité d'une orthèse plantaire sur la position du pied dans le plan frontal. Les forces médiales et latérales sont définies par rapport à la ligne de trajectoire du centre de masse.
Supination : LMFI positif
Pronation : LMFI négatif
La dérive
La dérive d'un capteur exprime la lente variation d'un signal de sortie en fonction du temps. C'est une erreur de mesure qui évolue avec le temps. Pour une même quantité de force appliquée sur un capteur, la mesure va diminuer ou augmenter au cour du temps. Cette dérive est définie sur une pente (figure 16).
La dérive positive : le capteur va mesurer de plus en plus même si la pression appliquée reste la même.
La dérive négative : le capteur va mesurer de moins en moins même si la pression appliquée reste la même.
Figure 16
La dérive est un facteur de non fiabilité du système.
Les indications de la baropodométrie
-
Troubles morpho statiques (pied plat, pied creux, hallus valgus)
-
Troubles fonctionnels (lésions articulaires, pathologies neuromusculaires)
-
Pied neuropathe
-
Métatarsalgie
La baropodométrie dynamique apporte une analyse complémentaire à l'analyse clinique d'une pathologie, une orientation sur le type de prise en charge, une analyse de l'évolution d'une pathologie, une évaluation de l'efficacité d'une orthèse plantaire (par baropodométrie embarquée).